 |
Jaroslav Křivánek |
A Unified Manifold Framework for Efficient BRDF Sampling
based on Parametric Mixture Models
|
Sebastian Herholz
Tübingen University |
Oskar Elek
Charles University, Prague |
Jens Schindel
Tübingen University |
Jaroslav Křivánek
Charles University, Prague |
Hendrik Lensch
Tübingen University |
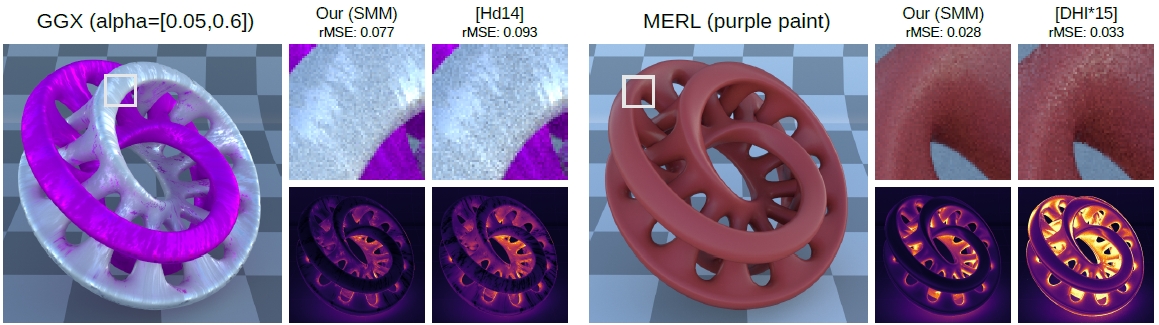
Sampling quality of our unified sampling framework for an analytic isotropic BRDF model with spatially varying roughness values
(left) and a measured BRDF from the MERL database (right). By using a PMM representation for the BRDF sampling function, our method
outperforms the current state-of-the-art sampling methods (as seen in the insets at the top and the false-color variance plots at the bottom).
Abstract
Virtually all existing analytic BRDF models are built from multiple functional components (e.g., Fresnel term, normal distribution function, etc.). This makes accurate importance sampling of the full model challenging, and so current solutions only cover a subset of the model’s components. This leads to sub-optimal or even invalid proposed directional samples, which can negatively impact the efficiency of light transport solvers based on Monte Carlo integration. To overcome this problem, we propose a unified BRDF sampling strategy based on parametric mixture models (PMMs). We show that for a given BRDF, the parameters of the associated PMM can be defined in smooth manifold spaces, which can be compactly represented using multivariate B-Splines. These manifolds are defined in the parameter space of the BRDF and allow for arbitrary, continuous queries of the PMM representation for varying BRDF parameters, which further enables importance sampling for spatially varying BRDFs. Our representation is not limited to analytic BRDF models, but can also be used for sampling measured BRDF data. The resulting manifold framework enables accurate and efficient BRDF importance sampling with very small approximation errors.
Reference
Sebastian Herholz, Oskar Elek, Jens Schindel, Jaroslav Křivánek, Hendrik P. A. Lensch.
A Unified Manifold Framework for Efficient BRDF Sampling based on Parametric Mixture Models.
Proceedings of EGSR (Experimental Ideas & Implementations), June 2018
DOI | BibTeX
Links and Downloads
| paper fulltext |
supplemental comparisons |
 |
 |
| pdf (10 MB) | zip (50 MB) |
Acknowledgments
This work was supported by the German Research Foundation (DFG): SFB 1233, Robust Vision: Inference Principles and Neural Mechanisms, TP 2. It received further funding from the European Union’s Horizon 2020 research and innovation program, under the Marie Skłodowska-Curie grant agreement No 642841 (DISTRO) and was supported by the Czech Science Foundation grant 16-18964S and the Charles University grant SVV-2017-260452.