Petr Kadleček

I'm a Ph.D. candidate of Computer Science (Computer Graphics and Image Analysis)
supervised by Ladislav Kavan and co-supervised by Jaroslav Křivánek.
I'm a member of Computer Graphics Group at Faculty of Mathematics and Physics, Charles University.
Research Interests
Physics-Based modeling and simulation
Computer graphics and animation
Biomechanics
Haptic Rendering
Visits
I was visiting Univeristy of Utah from 2015 - 2018.
Contact
| E-mail: | kadlecek (at) cgg.mff.cuni.cz |
| E-mail: | petr.kadlecek (at) GMAIL.COM |
I work for Oculus Research / Facebook Reality Labs
Publications
Building Accurate Physics-based Face Models from Data
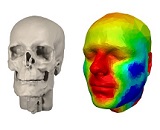
Petr Kadlecek, Ladislav Kavan.
ACM SIGGRAPH / Eurographics Symposium on Computer Animation 2019
PACMCGIT / Proceedings of the ACM on Computer Graphics and Interactive Techniques
Please visit a paper page
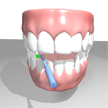
Phace: Physics-based Face Modeling and Animation

Alexandru-Eugen Ichim, Petr Kadlecek, Ladislav Kavan, Mark Pauly.
ACM Transactions on Graphics (Proceedings of SIGGRAPH), 2017
Please visit a paper page
Reconstructing Personalized Anatomical Models for Physics-based Body Animation

Petr Kadlecek (*), Alexandru-Eugen Ichim (*), Tiantian Liu, Jaroslav Krivanek, Ladislav Kavan.
ACM Transactions on Graphics (Proceedings of SIGGRAPH Asia), 2016; (* joint first authors)
Please visit a paper page
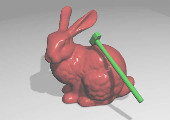
Haptic rendering for under-actuated 6/3-DOF haptic devices
Petr Kadlecek, Petr Kmoch, Jaroslav Krivanek
Proceedings of the EuroHaptics 2014, Versailles, June 2014
Please visit a paper page
Abstract: Under-actuated 6/3-DOF haptic devices are mostly used for simple 3-DOF point-based haptic interaction because of missing torque feedback. In this work, we present a system involving sensory substitution and pseudo-haptic feedback that effectively simulate torque feedback using visuo-tactile cues. The proposed system was implemented into a 6-DOF haptic rendering algorithm and tested on an under-actuated haptic device in a user study. We found that by applying our torque simulation system, the torque perception increases significantly and that 6/3-DOF devices can be used in complex tasks involving 6-DOF interactions.
Haptic rendering for 6/3-DOF haptic devices
Petr Kadlecek
Master Thesis (2013)
Download: kadlecek_petr_master_thesis.pdf
Abstract: Application of haptic devices expanded to fields like virtual manufacturing, virtual assembly or medical simulations. Advances in development of haptic devices have resulted in a wide distribution of assymetric 6/3-DOF haptic devices. However, current haptic rendering algorithms work correctly only for symmetric devices. This thesis analyzes 3-DOF and 6-DOF haptic rendering algorithms and proposes an algorithm for 6/3-DOF haptic rendering involving pseudo-haptics. The 6/3-DOF haptic rendering algorithm is implemented based on the previous analysis and tested in a user study.
Overview of current developments in haptic APIs
Petr Kadlecek, Petr Kmoch
Proceedings of CESCG 2011
Download: PragueCUNI-Kadlecek-Petr.pdf

Abstract: Haptic technology as a key part of human-computer interaction allows us to use sense of touch in virtual reality by kinesthetic feel using force feedback. Increased production of haptic devices in recent years supported the development of many tools and libraries for programming applications with support of haptics. This paper introduces haptic technology and focuses on comparison of haptic application programming interfaces, especially on open-source and cross-platform solutions. We present different types of abstraction layers used in haptic APIs, basic haptic rendering methods and effects as well as a general overview of design concepts used in selected APIs. CHAI 3D haptic library is analyzed in more detail.
A Practical Survey of Haptic APIs
Petr Kadlecek
Bachelor Thesis (2010)
Download: kadlecek_petr_bachelor_thesis.pdf
Project page: Haptic API suite
About thesis: Haptic API survey

Abstract: Haptic devices have a great potential in medical fields, engineering and help for visually impaired people. Massive distribution and support have made it possible to create many tools and libraries for programming applications with support of haptics. This thesis presents and analyzes APIs for haptic programming which mostly support a Novint Falcon device. A part of the thesis is a set of testing applications illustrating a basic use of these APIs. The survey then focuses on a CHAI 3D API. Larger demonstrating application is created and a libnifalcon cross-platform driver is implemented to the CHAI 3D.
Projects
Stubble - virtual hairstyling plug-in for Autodesk Maya
Software Project (team of 8 students)
Martin Bulant, Ivan Jankovic, Jan Kadlec, Petr Kadlecek, Martin Kahoun, Martin Liska, Martin Sik, Ales Tamchyna
Project info at Matfyz.cz (in Czech)
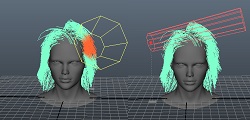
Stubble is a software providing user-friendly virtual hairstyling, i.e., creating, editing and animating virtual hair or fur. It aims for low disk space consumption on render time and wide user control over the output; all while maintaining simplicity of the user interface and providing real-life like tools for editing hair, e.g., brush and scissors. Besides using mouse for hairstyling, tablet or haptic device can also be used.
We've released the source code for Stubble project on GitHub!.
Students
Adaptive Simulation of Large-Scale Ocean Surfaces
Master Thesis
Abstract: Physically-driven methods of simulating fluid dynamics and frequency-based ocean surface synthesis methods are of long-standing interest for the field of computer graphics. However, they have been historically used separately or without any interaction between them. This thesis focuses on the possibility of combining the approaches into one adaptive solution by proposing methods for unified surface representation, method result blending and one-way interaction between the methods. The thesis also outlines several future developments of the combined method and proposes a level-of-detail approach taking advantage of hardware tessellation that can be used regardless of what method was used for the simulation.