
|
Jiří Vorba |
| Schedule: | Lecture - Wed 12:20-13:50 Zoom | Labs - Wed 14:00-15:30 Zoom |
| Zoom: | Lecture | Labs |
| Lecturer: | Jiří Vorba, e-mail: jirka at cgg.mff.cuni.cz |
| Organization: | 2/2 C + Ex link to SIS |
This lecture was previously given by prof. Jaroslav Křivánek as
| Oct 21th (originally Oct 16th) | Assignment 0 due (your renderings) | ||
| Nov 13th | Assignment 1 due | ||
| Nov 27th | Assignment 2 due | ||
| Dec 11th | Assignment 3 due | ||
| Dec 18th | Assignment 4 due | ||
| Jan 8th | Assignment 5 due |
| Lecture topic | Slides & notes | Auxiliary materials |
| Organization, Intro | Lecture: pdf | pptx / pdf | pptx | |
| Radiometry |
Lecture:
pdf |
pptx Labs pdf | pptx |
Petr Olšák - dOmega (in Czech) Petr Olšák - Radiometric units (in Czech) Wikipedie - Radiometric units |
| Light reflection, BRDF |
Lecture:
pdf |
pptx Labs: pdf | pptx |
Scratchpixel - Mathematics of shading Scratchpixel - Introduction to shading Scratchpixel - The Phong model, Reflection models and BRDF Fabrizio Duroni - How to calculate reflection vector |
| Monte Carlo methods, Direct illumination calculation |
Lecture:
pdf |
pptx Labs: pdf | pptx |
|
| Monte Carlo methods II, Image-based lighting |
Lecture:
pdf |
pptx |
|
| Combined estimators & Multiple Importance Sampling |
Lecture:
pdf |
pptx |
|
| Rendering equation and its solution |
Lecture:
pdf |
pptx |
|
| Path tracing |
Lecture:
pdf |
pptx |
|
| Quasi-Monte Carlo methods |
Lecture:
pdf |
pptx |
My favorite samples - SIGGRAPH Course 2019 Rand() considered harmful Constructing quasi-random blue noise sequences(blue noise vs. low-discrepancy, extra supplementary material) Unreasonable effectiveness of quasirandom sequences(extra supplementary material) |
| Volumetric light transport and participating media rendering |
Lecture:
pdf |
pptx Monte Carlo methods for physically based volume rendering”, SIGGRAPH 2018 course |
Steve Marschner: “Multiple Scattering” Note that the pseudocode in the above material is buggy: In the Kajiya-style path tracing, homogeneous volume, version 1.0, in the function directScatteredEst(x, ω) a multiplication by sigma_s/sigma_t (i.e. scattering albedo) is missing. Steve Marschner: “Volumetric path tracing” Patrick Harrington: Henyey-Greenstein phase function - CDF inversion, Rayleigh scattering phase function Walter Lewin: For the Love of Physics: Catchy demonstration of Mie and Rayleigh scattering |
| Bidirectional path tracing |
Lecture:
pdf |
pptx |
|
| Photon mapping |
Lecture:
pdf |
pptx |
|
| Approximate global illumination computation |
Lecture:
pdf |
pptx |
Using other peoples' work and presenting it as yours is an infringement of the code of conduct and is held as a reason for failing the class immediately.
Assignments can be handed in only in person during the labs. Failure to meet a given deadline is penalized by 50% of the maximum amount of points obtainable for the respective assignment for each week of delay (i.e. if you miss the deadline by two or more weeks, you will not receive any points for the assigment. Nonetheless, you are still required to hand the assignment in to be able to pass the class). When delivering the assignment, I will assume that you have a complete and detailed knowledge of the code. Not knowing how the code works is an indication of presenting other person's work as yours with the consequence given above.
The goal of the first assignment is to start building infrastructure for global illumination calculation, specifically to implement the evaluation of the BRDF and the classes representing various light sources. These components will be tested on the problem of calculating direct illumination due to point and area light sources using a Monte Carlo estimator based on explicit light source sampling. You will be required to show that your solution converges to this reference solution. (The difference image should only consist of uniform noise. Even better, use color-coded positive/negative differences in HDRImageTools.)
 |
 |
 |
 |
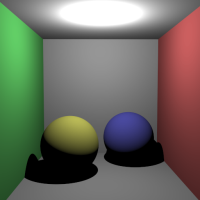
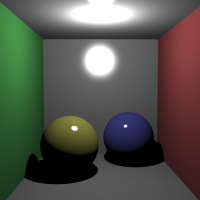
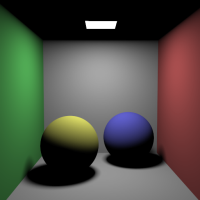
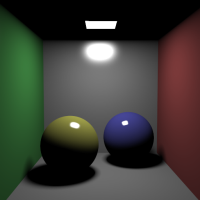
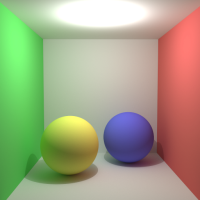
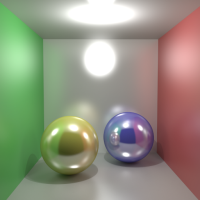
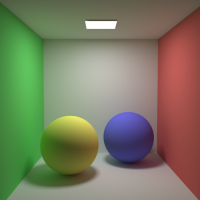
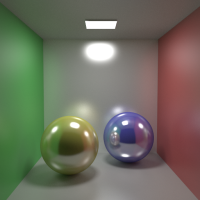
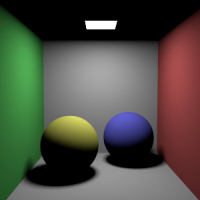
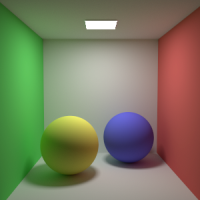
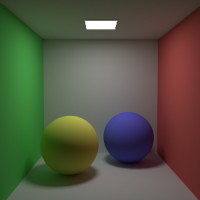
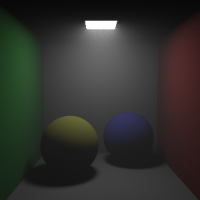
| Isotropic point lightDiffuse surfaces | Isotropic point lightGlossy surfaces | Large area lightDiffuse surfaces | Large area lightGlossy surfaces |
 |
 |
 |
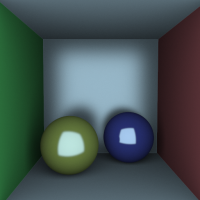 |
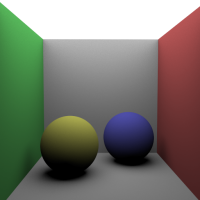
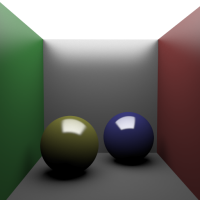
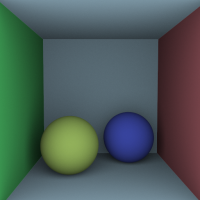
| Small area lightDiffuse surfaces | Small area lightGlossy surfaces | Const. environment mapDiffuse surfaces | Const. environment mapGlossy surfaces |
Altogether you can get up to 4 points for this assignment. The following table gives a breakdown of the points for the individual parts of the assignment. I recommend working in this very order, always first testing only the diffuse BRDF component and only then moving to the glossy version.
| Area light source | 2 points |
| Environment map with a constant emission: | 2 points |
| Image-based environment map (for directions see PBRT, Section 14.6.5.): | 3 extra points |
| Implementation of any anisotropic BRDF model (e.g. anisotropic Ward, anisotropic Ashikmin-Shirley): | 2 extra points |
| Extra assignment of your own choice: | max 3 extra points |
The goal is to implement an estimator of direct illumination based on randomized sampling of directions. To get this done, you will need to implement a) sampling of random directions from a uniform distribution on a hemisphere, and b) sampling of random directions proportional to the BRDF (importance sampling). You will then use this functionality to implement the estimator itself. Note that the estimator only works for area light sources and environment maps but not for point lights (the latter cannot be hit by a ray with a randomly chosen direction). Show that an estimator based on BRDF importance sampling is more efficient than an estimator based on uniform hemisphere sampling. Show that the solution converges to the same reference results as in Assignment 1.
You may receive up to 4 points for this assignment.
| Uniform hemisphere sampling: | 2 points |
| BRDF importance sampling: | 2 points |
| Possible extra assignment: | max 3 extra points |
Use Multiple Importance Sampling with the balance heuristic for direct illumination calculation. Combine estimators implemented in Assignments 1 and 2 (i.e. explicit sampling of positions on the light source and BRDF importance sampling). Show that the solution is more robust than either of the two estimators in the mixture. Show that the solution converges to the same reference results as in Assignments 1 and 2.
You may receive up to 6 points for this assignment.
| Possible extra assignment: | max 3 extra points |
In this assignment, you will build on the infrastructure from the previous assignments to implement the following methods:
Congratulations! By finishing this assignment, you have built a rendering core of state-of-the-art production renderers such as Corona or Arnold.
You may receive up to 8 points for this assignment.
| Quasi-Monte Carlo path tracing (e.g. the Halton sequence): | 2 extra points |
| Extra assignment of your own choice: | max 3 extra points |
 |
 |
 |
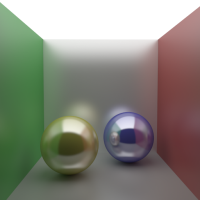 |
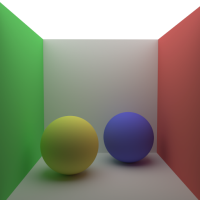
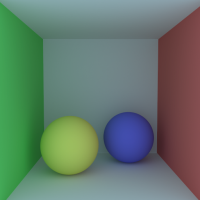
| Isotropic point lightDiffuse surfaces | Isotropic point lightGlossy surface | Large area lightDiffuse surfaces | Large area lightGlossy surface |
 |
 |
 |
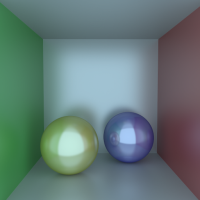 |
| Small area lightDiffuse surfaces | Small area lightGlossy surface | Const. environment mapDiffuse surfaces | Const. environment mapGlossy surface |
Extend your MIS path tracer such that it supports rendering scenes with a global homogeneous and isotropic participating medium. The medium is ‘global’ in the sense that it fills the entire space. (This makes the task much simpler for you because you don’t need to deal with the complex infrastructure for tracking which medium you are currently in.) The homogeneity refers to the fact that all the optical parameters of the medium are constant in space. Isotropic medium has a constant phase function (1/4π). The medium parameters are:
The reference images that I provide are for the diffuse scene with a small area light (the -s 4 command line parameter) where the path tracer converges relatively quickly. To make the rendering faster, I use a resolution of 300x300 pixels. Still, bear in mind that rendering multiple scattering in a medium using a basic path tracer is a computationally intensive process.
To make the debugging of your code simpler, I have prepared a number of tests:
 |
 |
 |
 |
| Direct illuminationNo medium | Full global illuminationNo medium | Direct illumination-onlyPurely absorbing medium | Full global illuminationPurely-absorbing medium |
 |
 |
||
| Direct illumination-onlyScattering medium | Full global illuminationScattering medium |